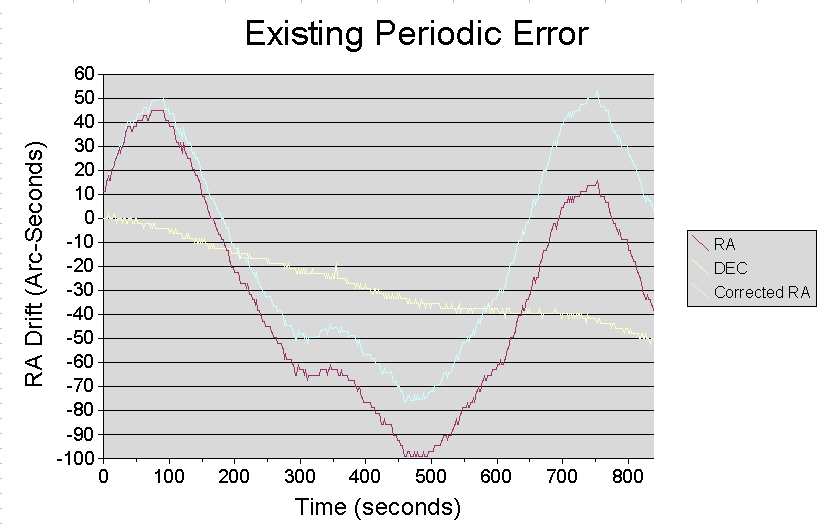
Shortly after I bought my telescope I also bought the standard EQ3-2 dual-axis drives. These work fine for general observation and it was only when I started using a webcam that I noticed that the periodic error would limit me severely in what I could image. Using the Drift Explorer in K3CCDTools I logged the drift in the scope and generated this graph -
I hadn't polar aligned very well which explains the declination drift, plus I was pointing south-east and quite high in altitude so there was some RA drift as well. I have adjusted the periodic error for this and it shows that I have around 125 arcseconds of drift per worm revolution. Using my modified Quickcam VC on my scope gives around 2 arcseconds per pixel, so it equates to about +-62 pixels every 11 minutes. To get a well tracked picture that has round stars (i.e. +-0.25 pixels drift) I am limited to a maximum exposure of just 2.6 seconds!
I want to set a target of usable 60 second exposures, which means a periodic error of just +-2.7 arcseconds per worm cycle which is only just what my average seeing will allow. I am going to implement a PEC system similar to more expensive goto scopes have. It will be controlled by a cheap microcontroller, running independantly of a computer and on a tight, but reasonable budget of around Ł25 ($50)...
The concept is simple enough, I take the same data that generated the above graph and apply the inverse of it over the cycle of the RA worm. A sensor on the RA worm tells the microcontroller when each cycle starts and therefore where in the list of data to start from. The microcontroller must be able to remember the periodic error by monitoring the existing handset and recording the corrections made in a special learning mode. As an extra, a computer can be attached to control the movements of the scope for autoguiding and to assist in the learning phase, but will not be in any way required. The general design should be applicable to any existing non-goto equatorially mounted telescope with a handset. In particular the EQ3-2, EQ4, EQ5, HEQ5, EQ6, CG4 and CG5 mounts all seem to use a similar generic handset so may it be possible to apply this modification directly to those mounts.
I can take no responsibilty for any damage that may occur to anyone or anything as a result of someone else modifying a mount/handset in this way and it will most likely void your warranty.
I should also point out that I am not hugely experienced in electronics or microcontroller programming. I normally choose resistors and capacitors by trial and error or past success rather than calculation. But I am a reasonable PC programmer and I am confident that I know enough to get this mod working reliably and fairly efficiently.